Automated Driving
Scenario
On-the-fly verification will be researched for the driving skill cooperative lane changing by DLR and Tecnalia. As shown in the figure below, cooperative lane changing requires the ego vehicle (V1) to identify and contact another automated vehicle (V2) driving in parallel: V1 and V2 have to negotiate whether V2 produces a gap in front or behind of it, V1 has to calculate and verify an according lane change trajectory and then execute the merge into the gap, while both vehicles ensure correct timing and collision avoidance. We will develop manoeuvre planning and control algorithms for the cooperative lane changing driving skill, which guarantee safety at any point in time during the manoeuvre and for which we take into account model imprecision, state measurement inaccuracies of both vehicles, message and internal delays, as well as exogenous disturbances. The scenario safe cooperative lane change will be demonstrated at 60 km/h on a straight road with two real test vehicles. Vehicles will be supplied by DLR and Tecnalia (see section 'vehicles') and the scenario will be set up on a proving ground near Braunschweig, Germany.

Vehicles
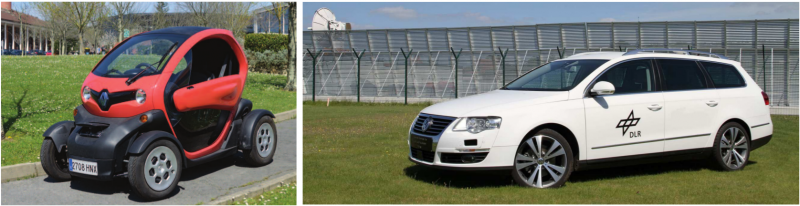
The DLR Braunschweig is operating FASCar (see figure below), a VW Passat well suited for fully automated driving in the speed range from -10 to 100 km/h with a sensor suite of INS, DGPS, lane-tracking camera, ACC-radar and IBEO laser scanner. Actuation is implemented with electronic steer by wire (mechanically decoupled steering wheel) and drive- and brake-by-wire. FAS-Car is equipped with an IEEE 802.11p Car2X communication device. In addition to the FasCAR, the DLR will provide the Dominion middleware and a traffic simulation suite. The Dominion middleware allows prototyping of automated-driving modules in simulation and integration of the modules into the test vehicle without porting overhead. The traffic simulation suite encompasses simulation of vehicle dynamics, sensors, communication between vehicles, other traffic participants, roadside infrastructure.
Tecnalia is operating a Renault Twizy, fully automated in the -10 to 45 km/h range and equipped with Car2X communication devices. The two automated vehicles of DLR and Tec will be employed in UnCoVerCPS to research and demonstrate automated, safety-verified cooperative lane change manoeuvres.
Video
Link to video : NGC Lane Change
Link to video : Lane Change Coordination via C2C (DLR Braunschweig) I
Link to video : Lane Change Coordination via C2C (DLR Braunschweig) II
Link to video : Lane Change Coordination via C2C (Edemissen Airport)
Link to video : Emergency Manoeuvre Planning
Collaborative human-robot manufacturing
Scenario
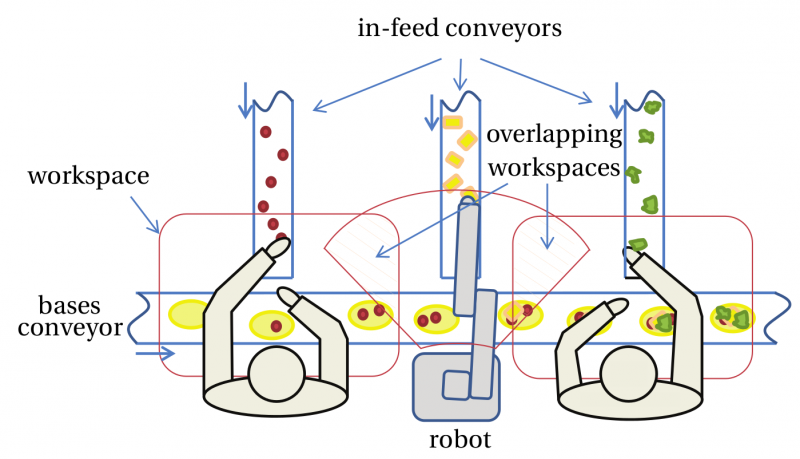
We will investigate the safety guarantees provided by the UnCoVerCPS project and assess the practicality of the approach for a human worker and robot co-worker collaborating on a food assembly line with overlapping workspaces. Specifically we will look at the situation of sandwich or pizza assembly where the main bases are coming down the assembly line being gradually built up as it progresses down the constantly moving line (see figure below). The line is supplied with components (food ingredients) on smaller in-feed conveyors set at 90 degree to the main conveyor. A mix of humans and robots take up positions along the line and place ingredients components on the bases in an opportunistic manner, i.e. if there is a base within the available workspace on the main conveyor that requires an ingredient within the workspace on the in-feed conveyor then that component will be picked and placed. The dynamic nature of the in-feed and output conveyors mean that the pick and place positions are undefined until a particular component is chosen and remain moving. Further, the robot should not enter a region of space already occupied (or about to be occupied) by a human worker.
Robot
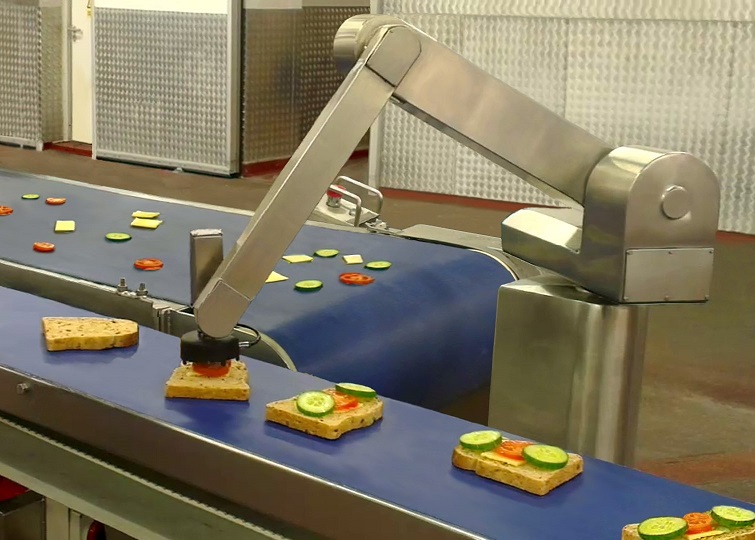
R.U.Robots Limited has developed a manipulator system for food industry assembly tasks, which is small, lightweight and built to hygienic design (see figure below). The GRAIL robot system features a novel and intuitive interface, which allows operators with no knowledge of programming to instruct the system by designing the end product (typically a sandwich, pizza or chilled ready meal) using a graphical touch screen. The system works out the correct sequence of assembly using vision system input and on-the-fly trajectory planning.
Video
Link to video : Human-Robot Collaboration on the GRAIL Robot
Control and online verification of a wind turbine
Scenario
Our object is to assess the capabilities of UnCoVerCPS in dealing with relatively simple nonlinear systems. Although it is possible to develop the physical and the control aspects of a wind turbine separately, increase in power output and eduction of overall wind turbine cost is anticipated if a unified development approach is chosen. All aspects of the wind turbine are jointly developed resulting in a unified model which can be analysed immediately for design flaws. Wind turbines also have to enforce stringent safety requirements. These requirements are not related to the physical or the computational part only, but rather a property of the whole system which is influenced by external factors like weather conditions. Therefore, an approach that unifies the design approach and is able to take external uncertainties into account is highly desirable.

Wind turbines
Both public models and GE-proprietary models of wind turbine will be used in this task. Public models of wind turbine will be obtained from the Up Wind project (http://upwind.eu). GE will actively engage with the certification authorities in order to promote and identify new certification requirements which will allow the creation of wind turbines aware of their environment and able to change their control strategy accordingly.
Robust and fault-tolerant control of smart grids and their components
Scenario
We will assess the scalability properties ofUnCoVerCPS for large-scale systems by varying the numbers of generating, transmitting, and consuming nodes of a smart grid. We expect to identify the critical parts of the control, verification and simulation algorithms that need further improvement in order to cope with large number of variables and, possibly, long simulation or verification time horizons. In addition, we aim at showing that the unified control and verification algorithms of UnCoVerCPS can contribute to maintaining stable smart grid operation in case of faulty operation of selected grid components. The smart grid scenario is simulated since power plants are obviously too expensive for test purposes.
