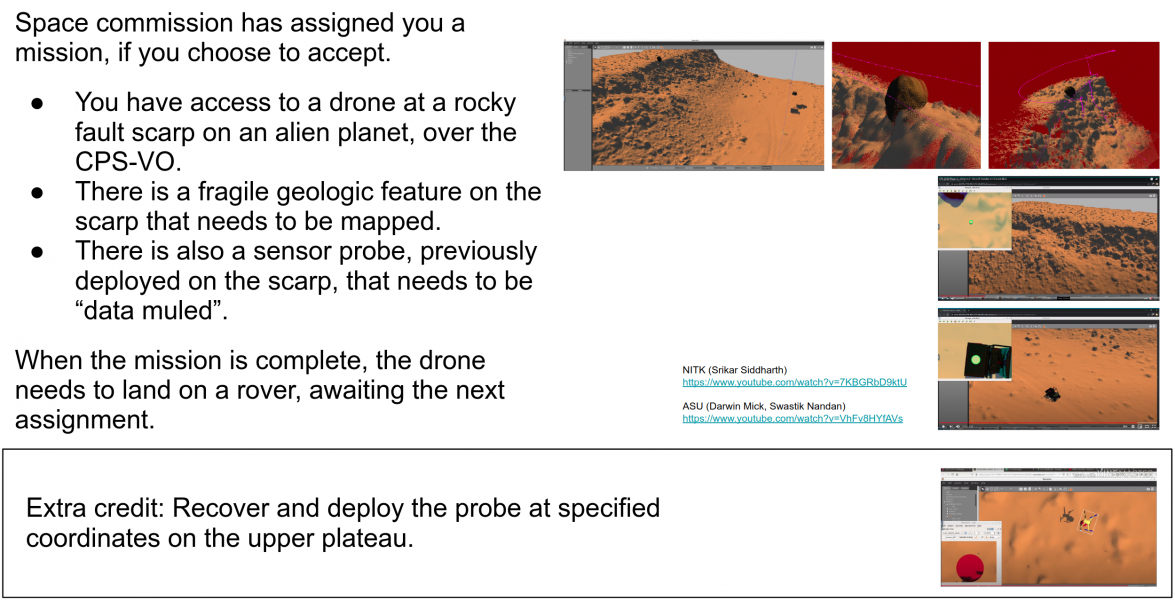
Rocky Times Challenge
(mapping a precariously balanced rock at a fault scarp)
March-April 2022

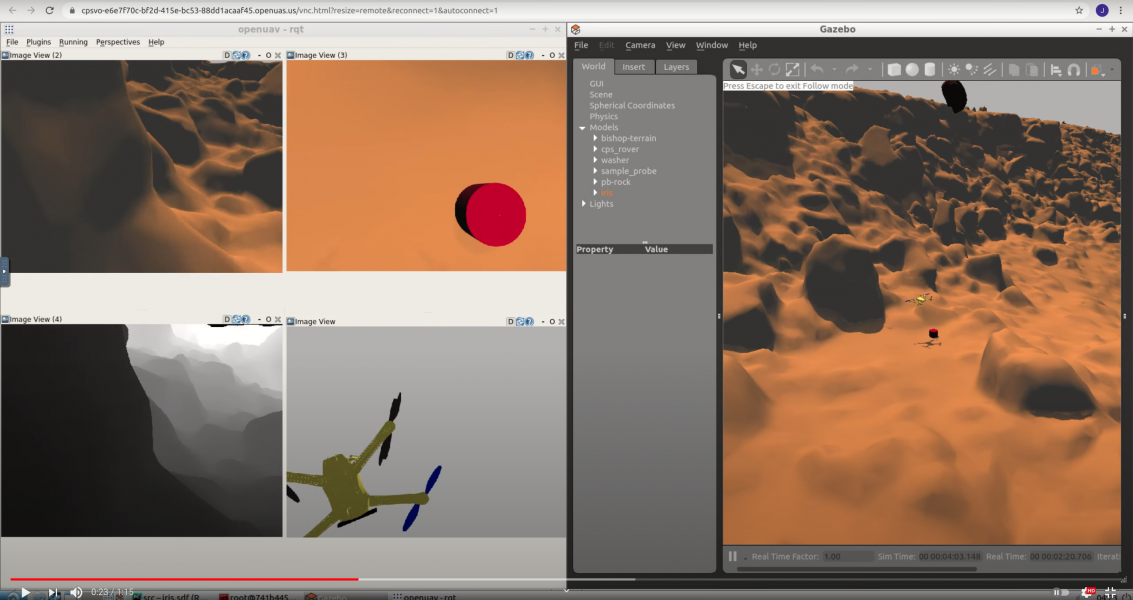
Instructions for running your simulation environment
1) Use the Design tab on the left to launch a simulation container, use 'OpenUAV2'.
2) Once the container has launched, open a terminal.
3) Launch phase-1 rocky scarp world:
roslaunch cps_challenge_2020 phase-1.launch
4) Start QGC using the desktop shortcut.
5) Try some PX4 offboard control example scripts written in ROS with MAVROS package:
a) A box of 8m width, at height of 2m
python /root/catkin_ws/src/cps_challenge_2020/scripts/position_control_demo.py
b) Make the drone visit the precariously balanced rock,
and come back to home (without landing), and loop the pattern
Fun fact: one of the repeated visits might topple the rock!
/root/catkin_ws/src/cps_challenge_2020/scripts/pbr_mapping_setpoints_demo.py
6) Now you can also play around with RTABmap (preinstalled)
roslaunch rtabmap_ros rtabmap.launch
7) Suspend the container when done, and resume when you want to continue.
Fun screencast of position control mission for toppling a rock (no mapping)
If you have any questions, please contact Jnaneshwar Das <jdas5@asu.edu>