Camera-based Triggering of Bridge Structural Health Monitoring Systems using a CPS Framework
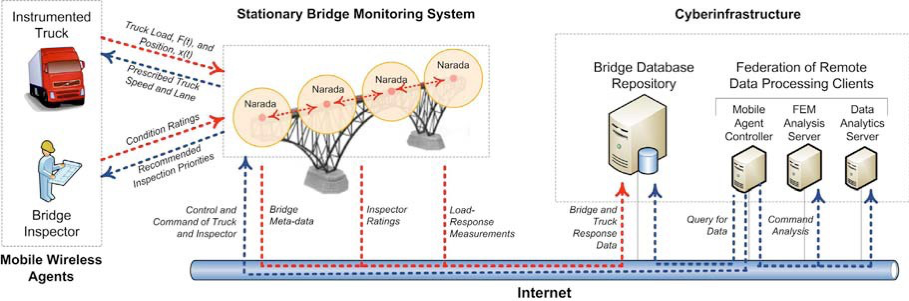
The goal of this project is to create a scalable and robust cyber-physical system (CPS) framework for the observation and control of the functional interdependencies between bridge structures (stationary physical systems) and trucks (mobile physical agents). A CPS framework (Figure 1) is being developed to monitor and control trucks within a single highway corridor to manage the imposed loads and the consumption of structural life by trucks on highway infrastructure including bridges. The framework begins with the installation of wireless sensing networks on bridges along a single highway corridor to collect environment and operational condition (EOC) data and truck-induced bridge response data. Wireless bridge monitoring systems aggregate their data in a local NoSQL database repository before being pushed via cellular link to a NoSQL database hosted in the cloud. A network of traffic cameras installed along the corridor are also utilized to provide real-time feeds of traffic at each instrumented bridge; computer vision algorithms extract trucks for identification of their type, lane assignment, and speeds which is pushed to the cloud-based NoSQL server. As heavy trucks move through the corridor, they are tracked and bridge responses associated with each truck are recorded. The CPS framework supports the analysis of truck-bridge interaction to provide a basis from which the health of bridges can be assessed over time. Furthermore, the CPS framework offers a direct means of triggering the monitoring activities across the entire corridor to maximize the value of information derived from recorded truck load events given the limited resources (e.g., energy, bandwidth) available with each bridge wireless sensor network. Finally, models of truck-bridge interaction serve as the basis for direct control of truck loads to minimize the consumed life associated with each truck load event. CPS-based control including truck drive parameters (e.g., lane assignment, speed) and feedback control using a reactive mass actuator on the truck trailer are being developed. Two highway bridges including the Newburg Road and Telegraph Road Bridges along the I-275 highway corridor in southeast Michigan are being used as a validation platform.